Biological Motion Perception
Overview
How Visual Familiarity Modulates Biological Motion Processing
📅 Oct 2017 – Jan 2019
🏛️ University of Skövde, Sweden
👥 Collaborators: Karl Drejing, Paul Hemeren
This project investigated how visual familiarity and spatial orientation affect biological motion perception of walking actions. Through two controlled experiments using point-light displays (PLDs), we examined:
- How incidental processing of flanker stimuli modulates attention
- Kinematic differences between forward/backward walking
- Processing hierarchies for upright vs. inverted biological motion
Stimuli & Apparatus
- Forward & Backward Walkers: Point-light stimuli (13-dot male gait) captured via motion capture at Skaraborg Gait Laboratory.
- Display: Visualized using MATLAB with Biomotion Toolbox-2 and Psychtoolbox-3, displaying white dots on a black background.
Experimental Design
Exp 1: Flanker Paradigm: Participants (N=20) identified walking direction of central target while ignoring flankers:
- Target variables: Orientation (Upright/Inverted) & Walking style (Forward/Backward)
- Flanker variables: Type (Unscrambled/Scrambled) & Congruency (Same/opposite direction as target)
- Design: 2×2×2×2×2 factorial (3,280 trials)
- Measures: Reaction time (RT) and accuracy
Exp 2: Isolated Target: Participants (N=9) identified walking direction of single targets:
- Target Variables: Orientation × Walking style
- Design: 2×2 factorial (320 trials)
- Measures: Reaction time (RT) and accuracy
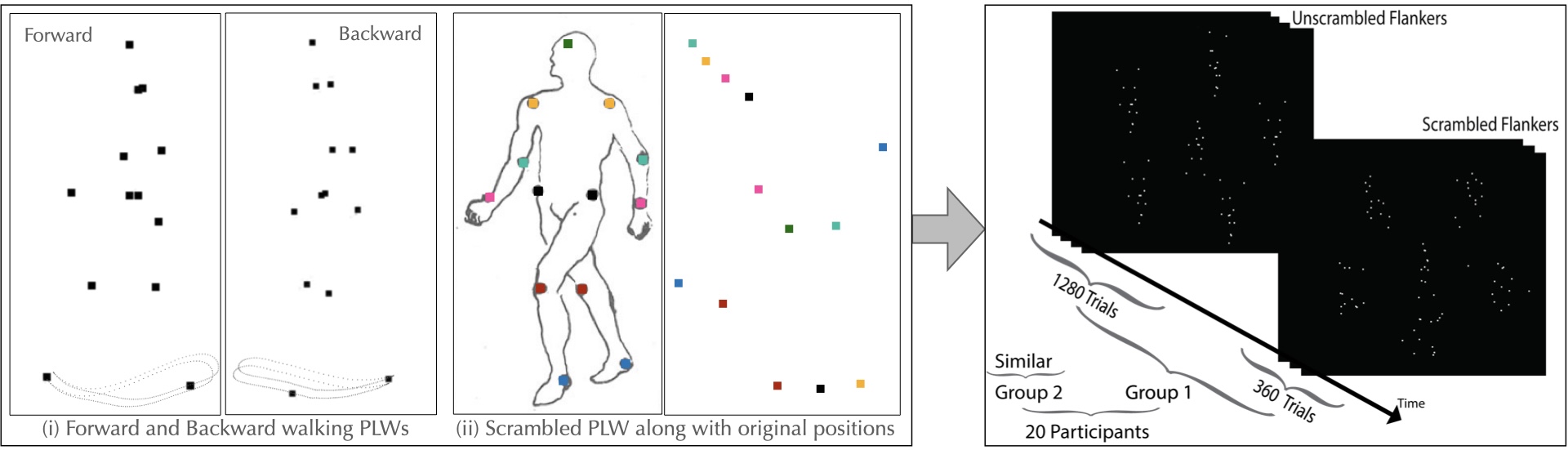
Study overview showing example human walking action and corresponding point light display presented to human participants
Key Findings
-
Processing Hierarchies:
- Upright forward-walking: Elicited the fastest response time (M=0.765s) and highest accuracy (99.6%), relying on global form processing (“vision-at-a-glance”).
- Inverted backward-walking: Showed the slowest response time (M=1.386s) and lowest accuracy (92.5%), requiring local motion scrutiny (“vision-with-scrutiny”).
-
Flanker Interference Effects:
- Congruency effect: 39ms faster RT when flankers matched target direction
- Strongest interference: Upright unscrambled flankers on inverted targets
- Scrambled flankers: 213ms faster RT than unscrambled
-
Kinematic Differences
- Forward walkers: Larger vertical displacement, higher acceleration peaks
- Backward walkers: Smoother deceleration, smaller stride span
- Critical cue: Acceleration components in swing phase
Impact & Applications
- Cognitive Science: Quantified visual familiarity effects in biological motion based on Reverse-Hierarchy visual-processing model.
- Human-Robot Interaction: Inform attention models for social robots and guide animation design for natural movement perception.
- XR Systems: Provides principles for intuitive virtual agent locomotion and optimization strategies for biological motion rendering.
Project Outcomes
Collaboration Opportunities
Open to collaboration or discussion on methodology, data, or future directions. Happy to exchange ideas and explore new perspectives.